This website contains a demo of 2D Kendo players which operate by neural networks which are trained by GAs.
http://chi.valro.us/ai/genetic-kendo.html
Interesting project but the page doesn't contain details regarding the design although it seems pretty simple.
Monday, December 29, 2008
Saturday, December 27, 2008
Coevolution and Distribution
The idea of coevolution in genetic algorithms is very interesting. It might not be directly usable in the first milestone for Gyoomard which is the development of a pattern generator for walking but the idea should be valuable in the next milestones.
Distributed GAs use time and space to evlove and can be highly beneficial for parallel programming.
The following paper has a good discussion on the above topic:
Distributed Coevlotionary Genetic Algorithms for Multi-Criteria and Multi-Constrain Optimisatioin, Phil Husbands
Distributed GAs use time and space to evlove and can be highly beneficial for parallel programming.
The following paper has a good discussion on the above topic:
Distributed Coevlotionary Genetic Algorithms for Multi-Criteria and Multi-Constrain Optimisatioin, Phil Husbands
Thursday, December 25, 2008
CTRNN basics
This paper:
On the Dynamics of Small Continuous-Time Recurrent Neural Networks, Randall Beer
provides a very good analysis of the inner workings for CTRNNs. There is an example problem solved using this kind of neural network.
For more scientific approaches to CTRNNs, you can follow this research:
Approximation of Dynamical Systems by Continuous Time Recurrent Neural Networks, Ken-ichi Funahashi and Yuichi Nakamura
This study involves a lot of mathematical background for these networks and describes the way in which they can model dynamical systems. Containing theorems and proofs.
On the Dynamics of Small Continuous-Time Recurrent Neural Networks, Randall Beer
provides a very good analysis of the inner workings for CTRNNs. There is an example problem solved using this kind of neural network.
For more scientific approaches to CTRNNs, you can follow this research:
Approximation of Dynamical Systems by Continuous Time Recurrent Neural Networks, Ken-ichi Funahashi and Yuichi Nakamura
This study involves a lot of mathematical background for these networks and describes the way in which they can model dynamical systems. Containing theorems and proofs.
More Readings
Here you can find a list of books which are taught in various courses during Master of Evolutionary and Adaptive Systems program at Sussex University. Not all of these are closely related to our research, but covers a wide range of topics related to Evolutionary Computation in general and Evolutionary Robotics in particular.
ALife
Artificial Life is the study of man-made systems that exhibit behaviors characteristic of natural living systems. It complements the traditional biological sciences concerned with the analysis of living organisms by attempting to synthesize life-like behaviors within computers and other artificial media. By ending the empirical foundation upon which biology is based beyond the carbonchain life that has evolved on Earth, Artificial Life can contribute to theoretical biology by locating life-as-we-know-it within the larger picture of life-as-it-could-be.[1]
Artificial Life is also the name of a course which is taught by Inman Harvey at Sussex University. This course is seminar based and the readings could be found here. Lecture notes are also accessible from the course home. The lectures cover things like GA, Co-evolution, SAGA (Species Adaptation Genetic Algorithms).
[1] - From: Artificial Life - Lecture1.
Artificial Life is also the name of a course which is taught by Inman Harvey at Sussex University. This course is seminar based and the readings could be found here. Lecture notes are also accessible from the course home. The lectures cover things like GA, Co-evolution, SAGA (Species Adaptation Genetic Algorithms).
[1] - From: Artificial Life - Lecture1.
Wednesday, December 24, 2008
Background Reading
There are lots of good documents to read in order to pursue the Gyoomard dream. We'll try to mention a few each time in these posts.
T. Reil and P. Husbands. Evolution of Central pattern Generators for Bipedal Walking in Real-time Physics Environments
This paper uses CTRNNs which are trained by GAs to evolve the walking motion for a biped. Our first milestone in Gyoomard project is to follow the study performed in this paper and prepare our simulation environment for further research. The CTRNN acts as a central pattern generator for the biped. MathEngine physics engine is the framework for the simulation. No sensor neurons are used in this study.
G. McHale and P. Husbands, Quadrupedal locomotion: GasNets, CTRNNs and Hybrid CTRNN/PNNs compared
Several techniques for evolving sensory motor systems of a four legged creature robot are tested in the above paper. GasNets have proven to be efficient in certain situations. ODE is used. This study uses sensor neurons to sense when the limbs touch the ground. A similar study has been done by the authors to compare many more different types of networks.
T. Reil and P. Husbands. Evolution of Central pattern Generators for Bipedal Walking in Real-time Physics Environments
This paper uses CTRNNs which are trained by GAs to evolve the walking motion for a biped. Our first milestone in Gyoomard project is to follow the study performed in this paper and prepare our simulation environment for further research. The CTRNN acts as a central pattern generator for the biped. MathEngine physics engine is the framework for the simulation. No sensor neurons are used in this study.
G. McHale and P. Husbands, Quadrupedal locomotion: GasNets, CTRNNs and Hybrid CTRNN/PNNs compared
Several techniques for evolving sensory motor systems of a four legged creature robot are tested in the above paper. GasNets have proven to be efficient in certain situations. ODE is used. This study uses sensor neurons to sense when the limbs touch the ground. A similar study has been done by the authors to compare many more different types of networks.
Monday, December 22, 2008
Quadrupedal ANN Architecture
I was reading "Quadrupedal Locomotion: GasNets, CTRNNs and Hybrid CTRNN/PNNs Compared" by Gary McHale and Phil Husbands. In the Experimental Setup section the description of ANN architecture is a bit vague. I tried to visualize the Table2 as follows:

It seems a bit funny, but it is enough for our discussion.
The table is as below:
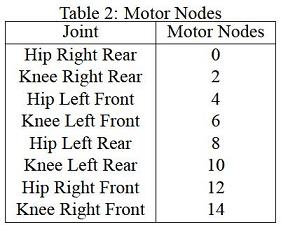
The problem comes when you consider this table wich shows the connection of sensory nodes with other nodes:

From the image above the connection between the sensory nodes and the mootor nodes are clear, but what are the nodes 1, 5, 9, 13. I'm not sure how the missing nodes are used.
Sunday, December 21, 2008
Simulation Testbed
A minimal simulation environment test bed has been developed so far. There are no automated controls yet and the pictures below display a sample biped trying to move its legs by manual control, (user control) and as is visible from the pictures, the user control is not very successful.
The goal for the first phase is to make the biped walk.


PhysX physic engine is being used for simulating the rigid body and joints dynamics. OpenGL is currently used for rendering the simple elements used for the biped.
The goal for the first phase is to make the biped walk.


PhysX physic engine is being used for simulating the rigid body and joints dynamics. OpenGL is currently used for rendering the simple elements used for the biped.
Saturday, December 20, 2008
Gyoomard
The first King of the World and the first person alive in Persian Mythology. The "living mortal" is the meaning of the word.
Gyoomard is a research on the use of evolutionary computation for development of sensory motor neural networks for simulated characters.
Gyoomard is a research on the use of evolutionary computation for development of sensory motor neural networks for simulated characters.
Subscribe to:
Posts (Atom)